Conception et analyse d’un robot Delta parallèle à 6 DDL
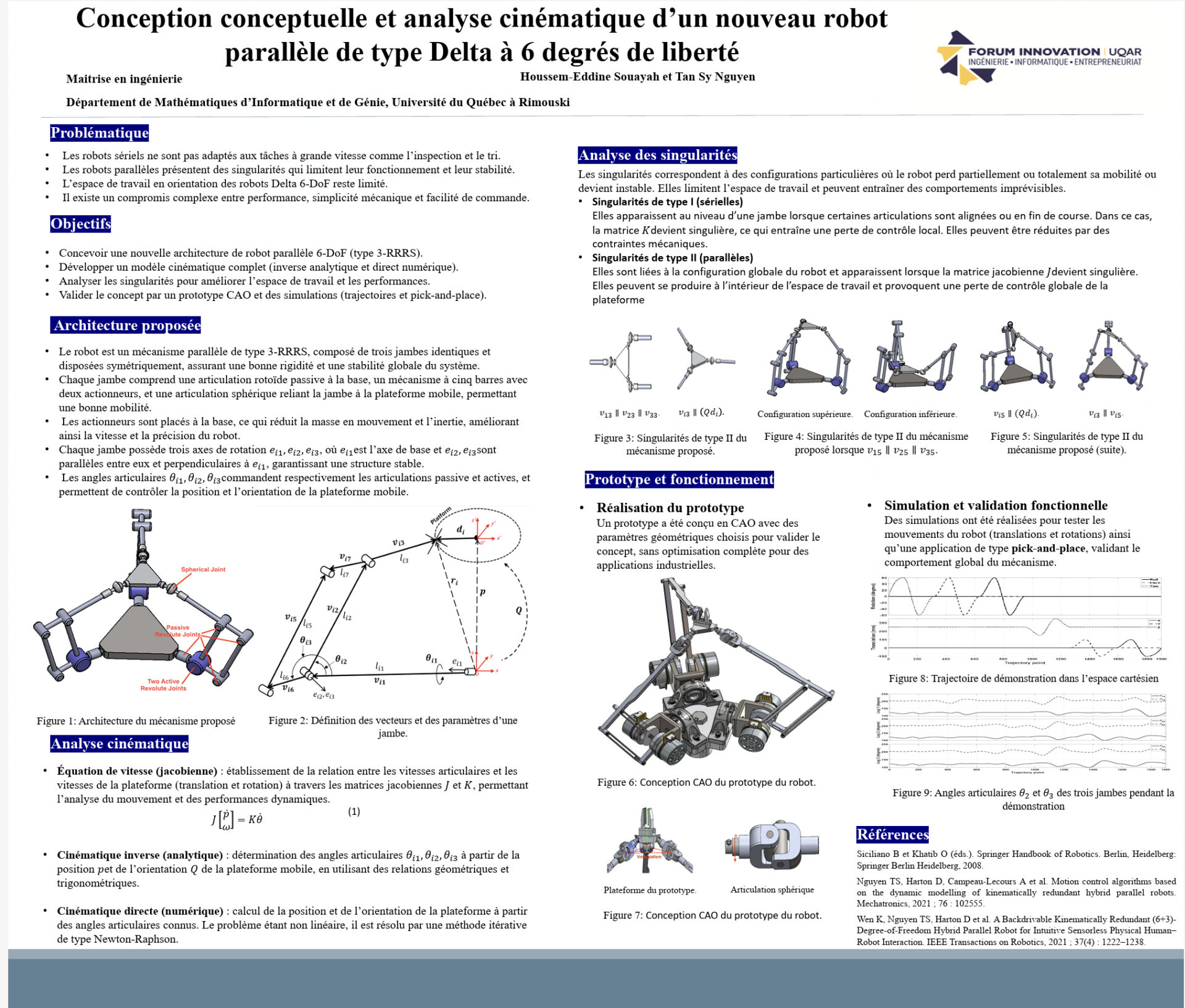
Ce projet porte sur la conception, la modélisation et l’analyse d’un nouveau robot parallèle de type Delta à 6 degrés de liberté (3 translations et 3 rotations), basé sur une architecture 3-RRRS. L’objectif principal est de proposer une structure mécanique capable d’assurer des mouvements rapides, précis et stables, tout en réduisant les limitations classiques des robots parallèles, notamment les singularités et la complexité de commande.
Le robot est constitué de trois jambes identiques disposées symétriquement autour d’une base fixe. Chaque jambe intègre une articulation rotoïde passive, un mécanisme plan à cinq barres avec deux actionneurs actifs, ainsi qu’une articulation sphérique reliant la jambe à la plateforme mobile. Les actionneurs étant placés à la base, la masse en mouvement est réduite, ce qui améliore les performances dynamiques du système.
Une modélisation cinématique complète est développée. La cinématique inverse est obtenue analytiquement afin de déterminer les angles articulaires à partir de la position et de l’orientation de la plateforme. La cinématique directe est résolue numériquement à l’aide de la méthode de Newton-Raphson. De plus, l’équation de vitesse est formulée sous forme jacobienne pour analyser les relations entre vitesses articulaires et mouvement de la plateforme.
Le projet inclut également une analyse détaillée des singularités de type I et II afin d’identifier les configurations critiques et de définir les limites de l’espace de travail. Enfin, un prototype CAO est développé et validé par des simulations, incluant des trajectoires spatiales complexes et une application de type pick-and-place. Ce travail constitue une base pour l’optimisation future et l’implémentation en environnement réel.
Présenté par