Détection de la distraction au volant, par la géométrie des poses du corps
La distraction au volant représente l’une des principales causes d’accidents de la route à l’échelle mondiale. Face à ce constat, les approches actuelles basées sur la vision par ordinateur peinent à concilier performance et légèreté — un compromis pourtant indispensable pour un déploiement embarqué en conditions réelles.
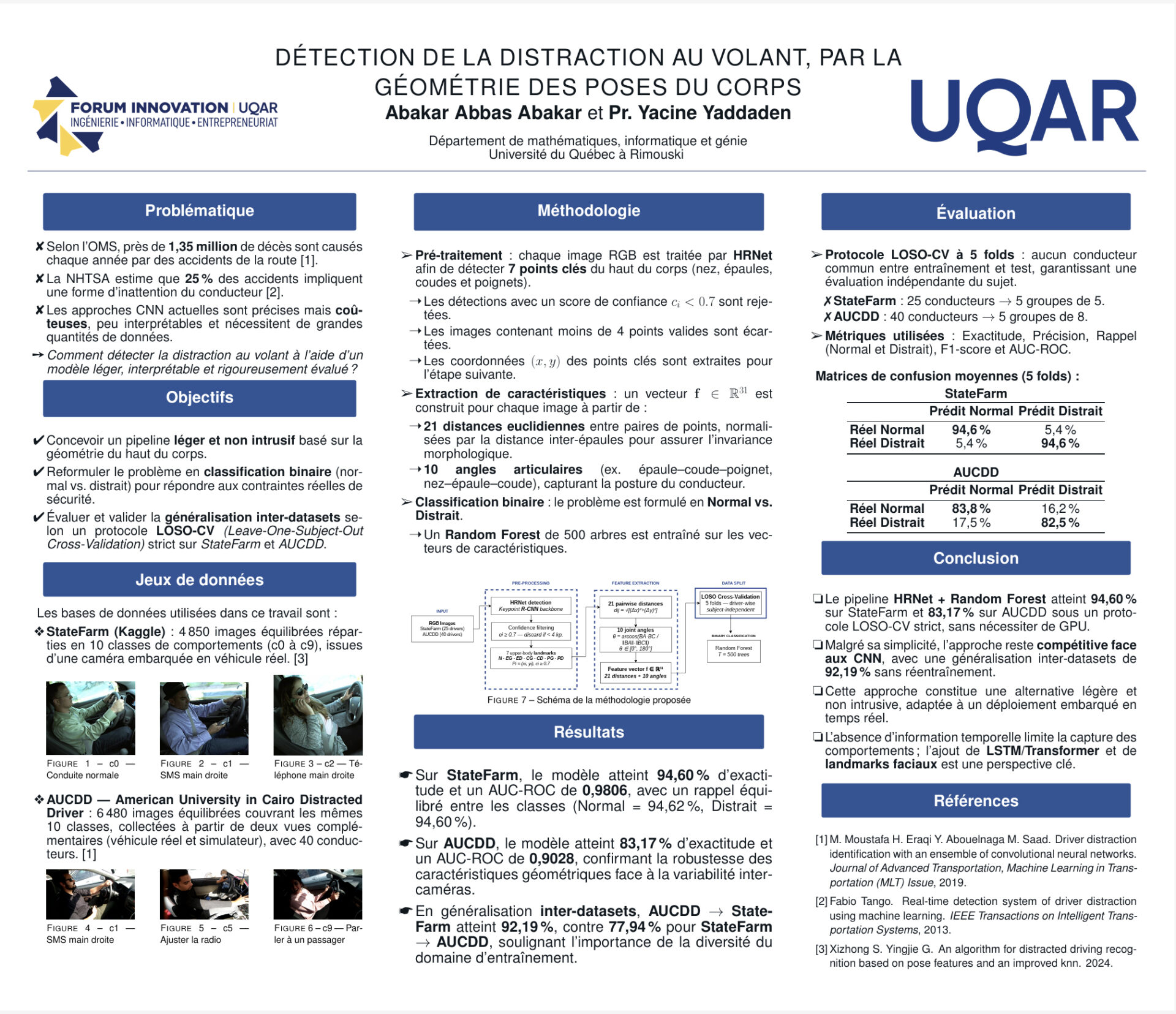
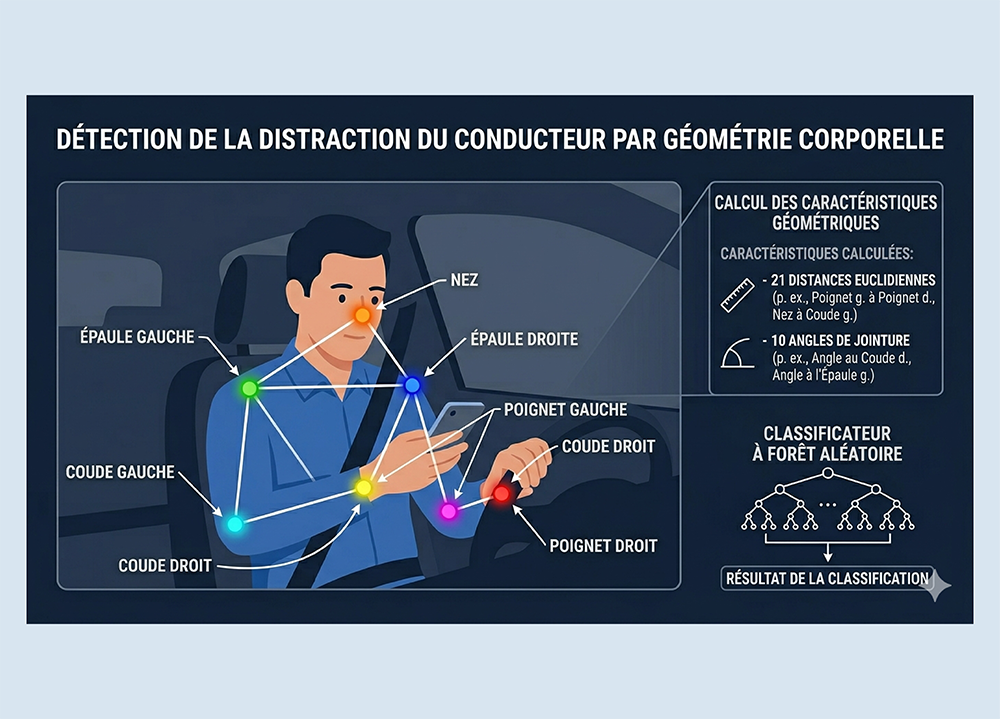
Ce travail s’appuie sur une observation simple mais puissante : la posture du corps trahit l’état d’attention du conducteur. En exploitant HRNet pour localiser 7 points anatomiques du haut du corps (nez, épaules, coudes, poignets), le système construit automatiquement une représentation géométrique de chaque image sous forme d’un vecteur de 31 caractéristiques — combinant distances inter-articulaires normalisées et angles de posture — sans jamais avoir besoin d’analyser le contenu visuel brut de l’image.
Cette représentation compacte est ensuite soumise à un Random Forest, choisi pour sa robustesse, son interprétabilité et son faible coût computationnel. Le problème est volontairement cadré en détection binaire (conduite normale vs. distraite), une formulation directement alignée avec les exigences des systèmes d’alerte embarqués. La rigueur de l’évaluation est assurée par un protocole LOSO-CV strict sur deux bases de données publiques — StateFarm (25 conducteurs) et AUCDD (40 conducteurs) — garantissant qu’aucun sujet ne chevauche les phases d’entraînement et de test.
Les expériences montrent des performances compétitives face aux approches profondes : 94,60 % de précision sur StateFarm avec un AUC-ROC de 0,98, et une capacité de généralisation inter-datasets atteignant 92,19 % sans aucun réentraînement. Une preuve que la simplicité, bien maîtrisée, peut rivaliser avec la complexité.
Présenté par
Abakar Abbas Abakar
Étudiant en maîtrise en informatique (profil recherche)