Détection automatisée des risques ergonomiques sur les bateaux de pêche au homard
Problématique
Les pêcheurs de homard sont soumis à de fortes contraintes physiques, dues à des postures exigeantes, des gestes répétitifs et un environnement de travail instable. Plus de 60 % d’entre eux déclarent souffrir de troubles musculosquelettiques. Les méthodes actuelles d’évaluation ergonomique, majoritairement basées sur l’observation humaine, restent subjectives, ponctuelles et difficiles à déployer en conditions réelles.
Objectif
L’objectif de ce projet est de développer un système de vision par ordinateur capable de détecter et d’évaluer automatiquement les postures à risque en conditions réelles de pêche, à partir d’indicateurs biomécaniques et de scores ergonomiques inspirés de la méthode OWAS.
Méthodologie
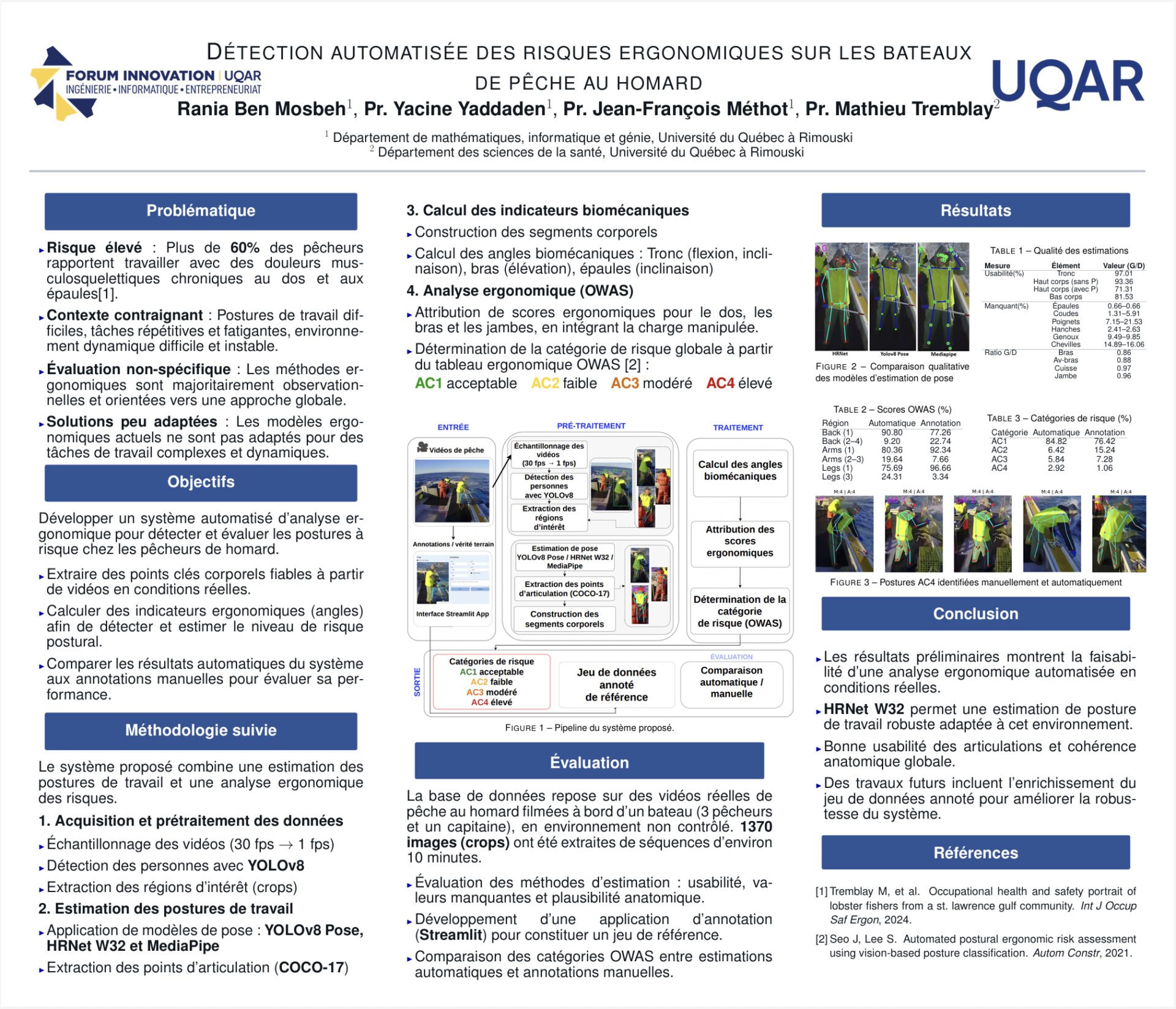
Le système proposé repose sur une chaîne de traitement automatisée appliquée à des vidéos réelles acquises à bord de bateaux de pêche au homard, dans un environnement dynamique et non contrôlé.
Les principales étapes sont les suivantes :
• Échantillonnage des vidéos (30 fps → 1 fps)
• Détection des personnes à l’aide de YOLOv8
• Extraction des régions d’intérêt
• Estimation de la pose humaine à l’aide de modèles tels que HRNet w32, YOLOv8 Pose et MediaPipe
• Calcul des angles biomécaniques (tronc, bras, jambes)
• Attribution de scores ergonomiques selon des règles inspirées de la méthode OWAS
• Détermination de la catégorie de risque (AC1 à AC4)
Une application d’annotation manuelle, développée avec Streamlit, a également été mise en place afin de générer des données de référence et de valider les résultats.
Résultats préliminaires
Les résultats préliminaires montrent que le modèle HRNet w32 fournit les estimations de pose les plus robustes et cohérentes en conditions réelles. La majorité des postures est classée en catégorie AC1 (posture acceptable), mais une tendance à la sous-estimation des catégories à risque élevé (AC3–AC4) est observée.
La comparaison avec les annotations manuelles met en évidence une bonne cohérence globale, tout en révélant certaines limites, notamment liées à l’estimation de la charge et à la complexité des postures.
Conclusion
Ce projet démontre la faisabilité d’une analyse ergonomique automatisée en conditions réelles de pêche. L’approche proposée permet une évaluation continue, objective et adaptée des postures dans un environnement dynamique.
Des améliorations sont envisagées, notamment pour affiner l’estimation de la charge manipulée et enrichir les annotations, afin d’améliorer la précision de l’évaluation des risques.
Présenté par
Rania Ben Mosbeh, étudiante à la maîtrise en ingénierie (volet recherche), UQAR