Reconnaissance de gestes inertiels par IA pour le contrôle d’un bras robotisé
Ce projet propose un système de reconnaissance gestuelle basé sur des capteurs inertiels et l’apprentissage profond. L’objectif est de développer une solution non intrusive capable d’interpréter les mouvements de la main afin de permettre un contrôle plus intuitif de systèmes robotisés, répondant aux enjeux d’interaction homme-machine.
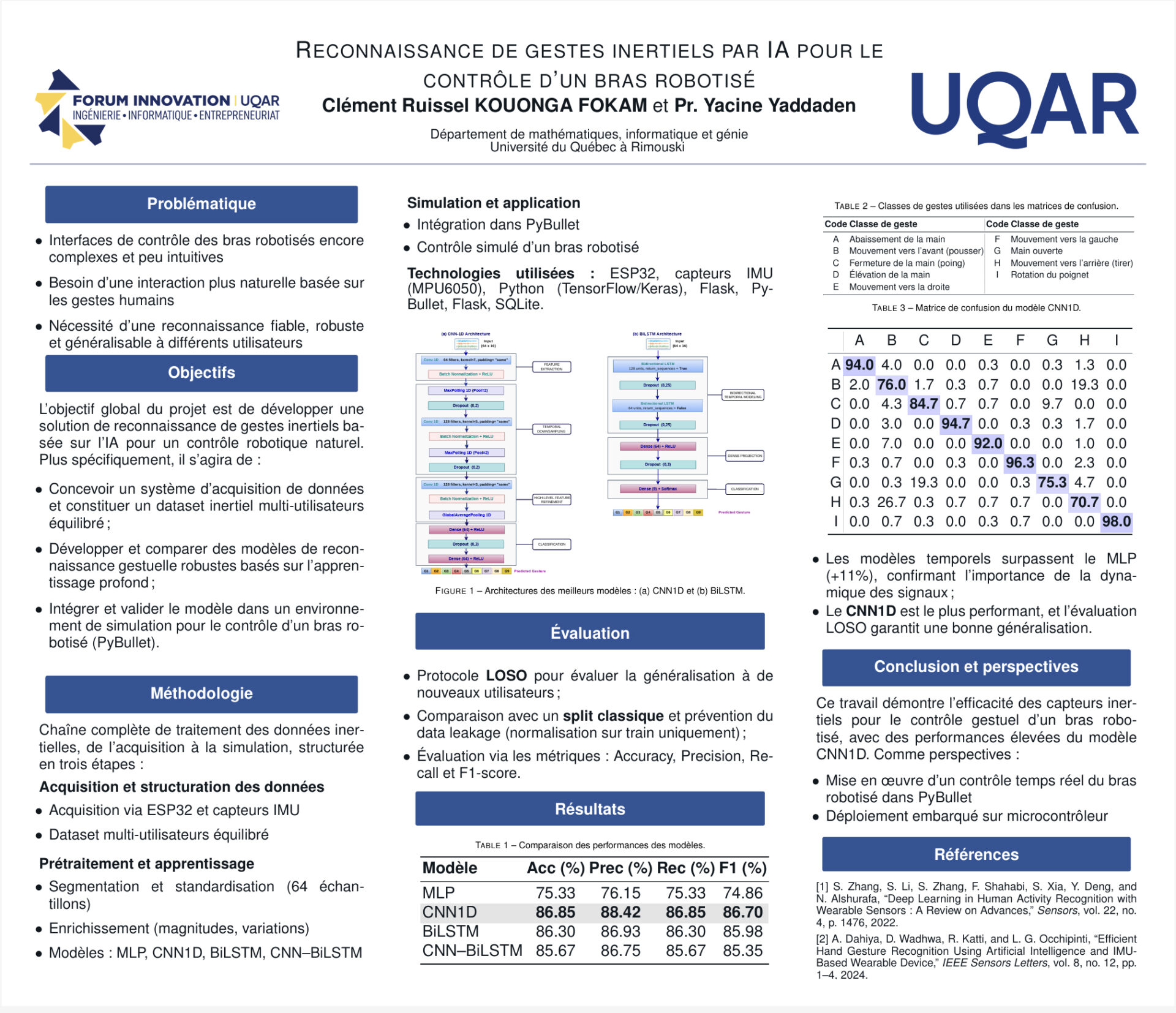
La méthode repose sur l’exploitation de données issues de capteurs IMU (accéléromètre et gyroscope), produisant des séries temporelles multivariées. Les signaux sont prétraités et transformés en représentations exploitables, incluant des caractéristiques dérivées telles que les magnitudes et les variations temporelles, afin d’améliorer la capacité de discrimination des gestes.
Dans ce contexte, la prise en compte de la dynamique temporelle des signaux constitue un élément central. Les données sont ainsi structurées en séquences de longueur fixe, permettant de capturer l’évolution des mouvements dans le temps et de mieux différencier des gestes présentant des similarités locales.
Ces séquences sont ensuite exploitées par plusieurs modèles d’apprentissage profond adaptés aux données séquentielles, notamment des architectures de type MLP, CNN 1D, BiLSTM et des modèles hybrides combinant extraction locale et modélisation temporelle.
L’évaluation du système est réalisée selon un protocole Leave-One-Subject-Out (LOSO), permettant d’estimer la capacité de généralisation à des utilisateurs non vus. Les résultats montrent que les architectures exploitant la structure temporelle des signaux offrent de meilleures performances que les approches plus simples, avec une précision moyenne supérieure à 85 % pour les meilleurs modèles.
Ce travail met ainsi en évidence l’intérêt de combiner capteurs inertiels, représentation temporelle des signaux et modèles d’apprentissage profond pour la reconnaissance gestuelle, avec des perspectives d’application dans le contrôle de systèmes robotiques en temps réel.
Présenté par
Clément Ruissel
Kouonga Fokam
Maitrise en informatique